V tipe vám predstavíme niekoľko nových aj starších užitočných funkcionalít objektu Pick-and-Place pre zvýšenie vašej efektivity pri tvorbe simulačných modelov.
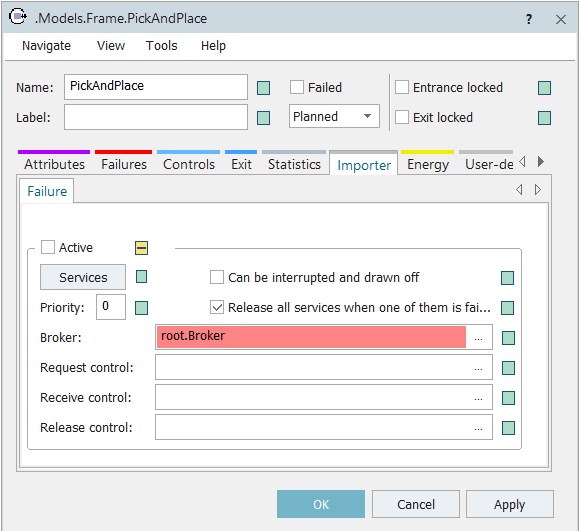
Od verzie Plant Simulation 14 Pick-and-Place (ďalej PAP) má záložku Importer, ktorá mu umožňuje nastaviť, aby pracovník (Worker) opravoval servisy pre odstránenie porúch.
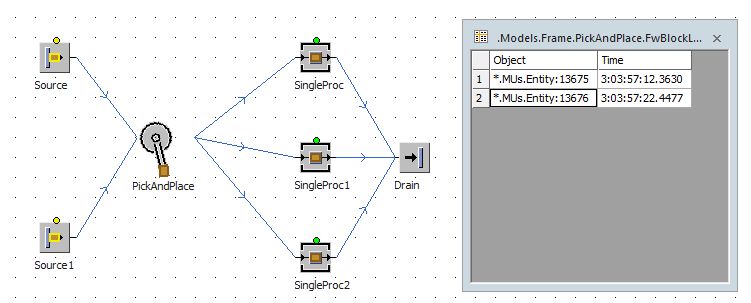
Forward Blocking list pre PAP objekt predstavuje list/tabuľku s MUs (Moveable units), ktoré mali byť premiestnené z objektu do cieľa, ale boli blokované procesom pred nimi. Taktiež určuje poradie, ktoré MU má byť premiestnené do cieľa. V prvom stĺpci listu je konkrétne MU a v druhom stĺpci čas, kedy vznikla požiadavka na prenos MU do cieľa. Poradie sa určuje automaticky tak, ako prichádzajú v čase požiadavky. Pomocou metódy je možné toto poradie meniť. Príkaz .fwblocklist umožňuje pracovať so samotným listom.

Novou funkcionalitou „Go to default position“ je možnosť vrátiť objekt PAP, resp. jeho rameno do východzej alebo do štartovacej polohy určením uhla natočenia (Default Angle).
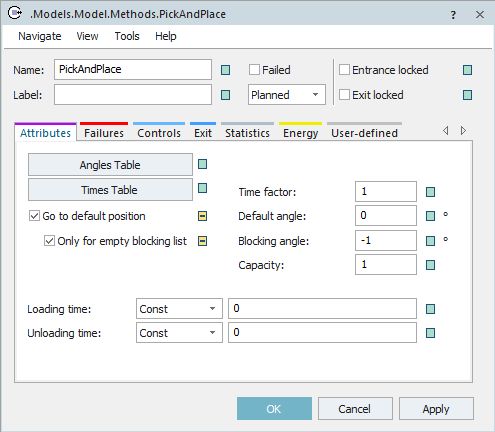
Ďalšou možnosťou „Only for empty blocking list“ je nastaviť, aby sa PAP vrátil do východzej polohy len vtedy, ak má prázdny blocking list.
Loading time je nový atribút, ktorý určuje čas uchopenia alebo naloženia MU na PAP. Unloading time, tiež nový atribút, predstavuje čas vyloženia MU z PAP.
Do záložky Exit pribudla možnosť zvoliť si novú stratégiu výstupných pravidiel „Target selection“. Určuje cieľ pre MU, ktoré má byť premiestnené z PAP:
- Exit strategy or target control – pôvodné nastavenie PAP
- Load part onto MU at sensor – umožňuje premiestniť MU na iné MU (Container, Transporter), ktorý stojí na senzore dĺžkovo-orientovaného objektu (track, line)
- Place part at sensor – umožnuje premiestniť MU priamo na senzor dĺžkovo-orientovaného objektu (track, line).