V tipe si predstavíme funkcionalitu automatického navádzania objektu transport (vozík) do zvolených destinácií (cieľov).
![]()
obr. 1
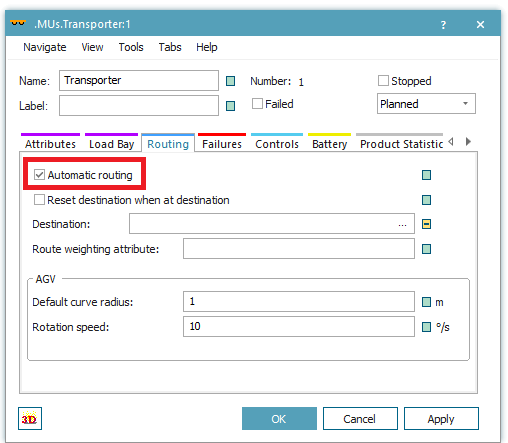
Výhodou je to, že transporter vždy nájde najkratšiu možnú trasu. Aby sme to dosiahli, použijeme funkciu „Automatic routing“ (obr. 2).
obr. 2
Poďme si to predviesť na jednoduchom príklade. Máme simulačný model, kde transporter vchádza do destinácií podľa tabuľky destination_table. Destination_table je zoznam destinácií, ktoré musí postupne navštíviť (obr. 3). Na začiatku simulácie metóda init vytvorí transporter a zapíše prvú úlohu (obr. 4).
![]()
obr. 3
![]()
obr. 4
Na výstupe z každej destinácie sa vyvolá metóda destination_exit (obr. 5), ktorá odpíše vykonanú úlohu z tabuľky destination_table. Následne zapíše transporter-u ďalšiu destináciu. To znamená, že do poľa destination (obr. 6) v transporter zapíše hodnotu z tabuľky (z 1. stĺpca a 1. riadku).
![]()
obr. 5
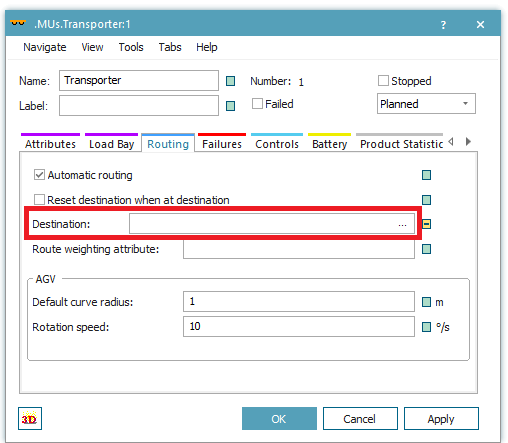
obr. 6
Simulačný model .spp si môžete stiahnuť TU
Tu si môžete pozrieť video simulačného modelu popísaného v tomto tipe: